
Tiny Robotic Fingers Let Humans Interact With Insects
Researchers at the Ritsumeikan University in Japan have developed a soft micro-robotic finger that allows direct interaction with the microcosm. The study, led by Professor Satoshi Konishi, was published in Scientific Reports.
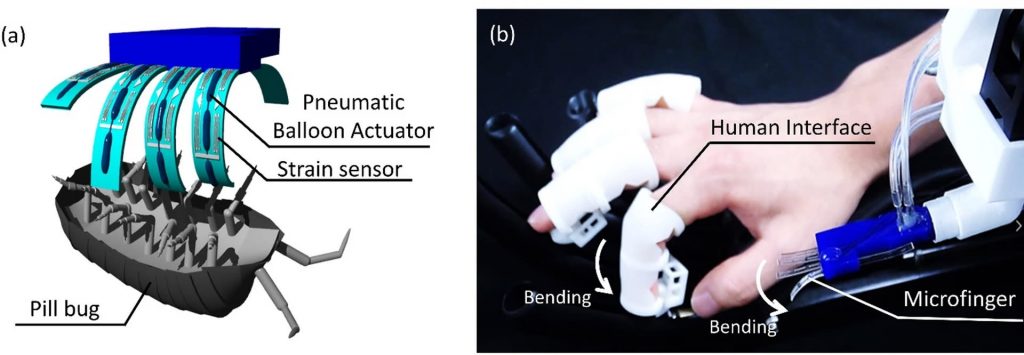
A tactile micro finger is achieved by using a liquid metal flexible strain sensor. A soft pneumatic balloon actuator acts as an artificial muscle, allowing control and finger-like movement of the sensor. With a robotic glove, a human user can directly control the micro fingers. This kind of system allows for safe interaction with insects and other microscopic objects,” Konishi said in a statement.
Using their newly developed micro-robot setup, the research team examined the reaction strength of the pill beetle as a representative sample of the insect. The tablet beetle was fixed in place with a suction tool, and a microfinger was used to apply force and measure the reaction force of the beetle’s legs.
The reaction force measured on the legs of the tablet beetle was approximately 10 mN, which is consistent with previously estimated values. Although this is a representative study and proof of concept, this result shows great promise for realizing direct human interaction with the microcosm.


